後輪も曲がる時代|BMW vs ベンツ vs アウディ 後輪操舵システム徹底比較
「後輪も曲がる」——これが、現代の高級車の常識だ。
かつて、ステアリングは前輪だけを操作するものだった。しかし今、BMW、メルセデス、アウディは、後輪まで操舵する技術を投入している。
低速では逆位相で小回り、高速では同位相で安定性向上。物理法則を巧みに利用した後輪操舵システムは、車の運動性能を根本から変えた。
しかし、BMW、メルセデス、アウディは、それぞれ異なる設計思想でこのシステムを開発している。
この記事では、ドイツ御三家の後輪操舵システムを、物理学から徹底比較します。
1. なぜ後輪を操舵するのか?
「前輪だけで十分なのに、なぜ後輪まで曲げる必要があるのか?」
答えは、「相反する2つの要求を同時に満たすため」だ。
現代の高級車が抱える矛盾
- 大型化:安全性・快適性のため、ボディは大型化。ホイールベースも長くなる。
- 小回り性能の要求:都市部での取り回し、駐車場での使いやすさが必要。
- 高速安定性の要求:アウトバーンや高速道路で、200km/h以上の安定性が必要。
これらはトレードオフの関係にある。
従来の問題:
・ホイールベースが長い → 小回りが効かない
・ホイールベースが短い → 高速で不安定
後輪操舵の解決策:
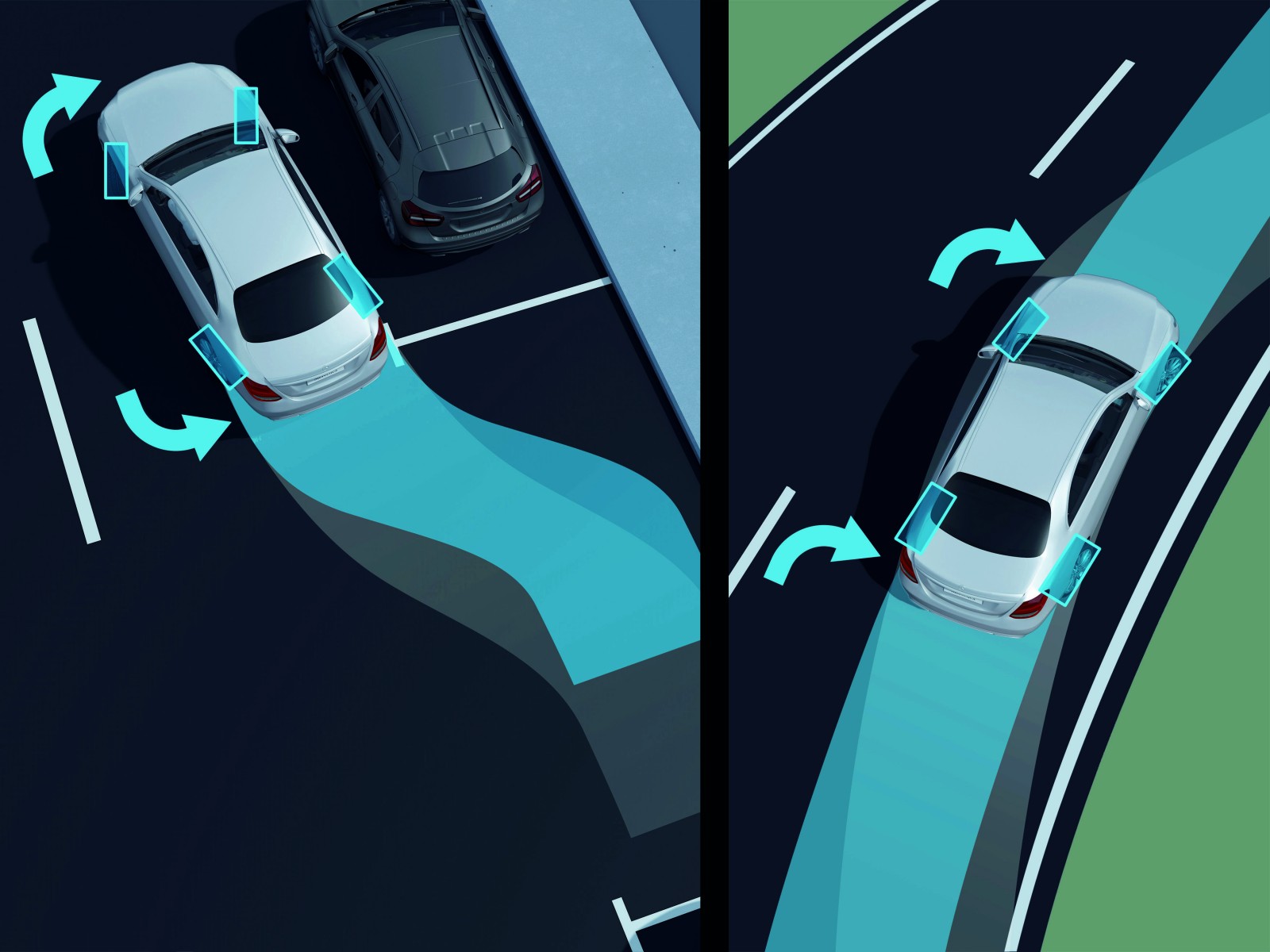
・低速時: 後輪を逆位相で操舵 → 実質的にホイールベースを短縮 → 小回り◎
・高速時: 後輪を同位相で操舵 → 実質的にホイールベースを延長 → 安定性◎
後輪操舵の物理学
【物理学①】ホイールベースと旋回半径の関係
旋回半径 R = L / tan(δ)
L: ホイールベース
δ: 前輪舵角
つまり:
ホイールベース(L)が長い → 旋回半径(R)が大きい → 小回りが効かない
後輪逆位相操舵の効果:
後輪を逆方向に切ることで、「実質的な」ホイールベースが短くなる効果が得られる。
例: BMW 7シリーズ(ホイールベース3,210mm)が、後輪逆位相操舵により、実質的に3,000mm相当の小回り性能を実現。
【物理学②】ヨーレートと車両安定性
ヨーレート γ = V / R
γ: ヨーレート(車両の回転速度)
V: 車速
R: 旋回半径
高速走行時の問題:
車速(V)が高いと、ヨーレート(γ)が大きくなり、車両が不安定に。
後輪同位相操舵の効果:
後輪を前輪と同じ方向に切ることで、旋回半径(R)が大きくなり、ヨーレート(γ)を抑制。
結果: 高速域でのレーンチェンジが安定、横風に強い。
2. BMW: Integral Active Steering
BMWの後輪操舵システム「Integral Active Steering」は、1つの哲学に基づいている。
それは、「駆け抜ける歓びを損なわない」こと。
Integral Active Steeringの構造
BMW Integral Active Steering
初登場:2008年 7シリーズ(F01)
現行採用車種:5シリーズ、7シリーズ、8シリーズ、X5、X6、X7
技術仕様:
- 後輪操舵角: 最大3度
- 電動モーター駆動
- 前輪舵角センサー、車速センサー、ヨーレートセンサーと連動
- 応答速度: 0.1秒以内
BMWの制御ロジック
| 車速域 | 後輪操舵 | 効果 |
|---|---|---|
| 0-60km/h | 逆位相(最大3度) | 最小回転半径-1m短縮 |
| 60-100km/h | 徐々に0度へ | 過渡期 |
| 100km/h以上 | 同位相(最大3度) | レーンチェンジ安定性向上 |
なぜBMWは「3度」なのか?
BMWの後輪操舵角は、最大3度と、ライバルより控えめだ。
BMWの設計哲学:
「後輪操舵は補助的な役割。ドライバーのステアリング操作を邪魔してはいけない。」
理由①:FRフィーリングの維持
BMWはFR(後輪駆動)メーカー。後輪操舵が強すぎると、「後輪で蹴り出す」感覚が薄れる。
理由②:ドライバビリティ
後輪操舵角が大きすぎると、車両の動きが「機械的」に感じられる。BMWは「自然なハンドリング」を重視。
理由③:信頼性
操舵角が小さいほど、機構がシンプルで故障リスクが低い。
xDriveとの連携
BMWの4WDシステムxDriveと、Integral Active Steeringは高度に連携している。
- アンダーステア検知時:前輪トルク増 + 後輪逆位相操舵 → 旋回性能向上
- オーバーステア検知時:後輪トルク増 + 後輪同位相操舵 → 安定性向上
- 高速レーンチェンジ:前後トルク配分 + 後輪同位相操舵 → スムーズな姿勢変化
3. メルセデス: Rear-Axle Steering
メルセデス・ベンツのRear-Axle Steeringは、「最善か無か」の哲学を体現している。
Rear-Axle Steeringの構造
メルセデス Rear-Axle Steering
初登場:2013年 S500(W222)
現行採用車種:Sクラス、EQS、Cクラス(一部)、Eクラス(一部)、GLC、GLE
技術仕様:
- 後輪操舵角: 最大10度(世界最大級)
- 電気油圧アクチュエーター
- 4MATIC(4WD)と統合制御
- 応答速度: 0.05秒以内
なぜメルセデスは「10度」なのか?
メルセデスは、後輪操舵角最大10度という、業界最大級の操舵角を採用している。
メルセデスの設計哲学:
「技術的に可能なら、最大限の効果を追求する。」
理由①:Sクラスの巨大ボディ
Sクラスのホイールベースは3,216mm。後輪操舵なしでは、最小回転半径が12mを超える。
10度の後輪操舵により、最小回転半径10.9mを実現。これはCクラス並みの小回り性能。
理由②:EV時代への布石
EQS(電気自動車)は、バッテリー搭載で車重2,500kg超。大型重量車ほど、後輪操舵の恩恵が大きい。
理由③:「魔法の絨毯」の追求
メルセデスは「快適性」が最優先。10度の操舵角により、ステアリング操作を最小限に抑えられる。
メルセデスの制御ロジック
| 車速域 | 後輪操舵 | 効果 |
|---|---|---|
| 0-60km/h | 逆位相(最大10度) | 最小回転半径-2.1m短縮 |
| 60-100km/h | 徐々に0度へ | 過渡期 |
| 100km/h以上 | 同位相(最大4.5度) | レーンチェンジ、横風に強い |
4MATIC+との統合制御
メルセデスの最新4WDシステム4MATIC+は、後輪操舵と完全統合されている。
- トルクベクタリング:左右後輪で独立したトルク配分 + 後輪操舵
- ESPとの連携:横滑り検知時、後輪操舵で即座に修正
- 予測制御:ナビゲーション連動で、コーナー手前から後輪操舵を準備
4. アウディ: Dynamic All-Wheel Steering
アウディのDynamic All-Wheel Steeringは、「クワトロ」との相乗効果を追求している。
Dynamic All-Wheel Steeringの構造
アウディ Dynamic All-Wheel Steering
初登場:2013年 A8
現行採用車種:A8、Q7、Q8、e-tron、RS6、RS7
技術仕様:
- 後輪操舵角: 最大5度
- 電動モーター + プラネタリギア
- quattro(4WD)と完全統合
- 応答速度: 0.08秒以内
なぜアウディは「5度」なのか?
アウディの後輪操舵角は最大5度。BMWより大きく、メルセデスより小さい。
アウディの設計哲学:
「クワトロとのバランスが最優先。後輪操舵は、4WDシステムを補完する技術。」
理由①:クワトロとの相性
アウディのクワトロは、常時4輪にトルクを配分。後輪操舵が大きすぎると、トルク配分と干渉する。
理由②:ドライバーの意図を尊重
アウディは「技術による先進(Vorsprung durch Technik)」を掲げるが、ドライバーの操作を最優先する。
理由③:コスト最適化
5度の操舵角は、機構がシンプルでコストも抑えられる。量産車への展開が容易。
アウディの制御ロジック
| 車速域 | 後輪操舵 | 効果 |
|---|---|---|
| 0-40km/h | 逆位相(最大5度) | 最小回転半径-1.1m短縮 |
| 40-60km/h | 徐々に0度へ | 過渡期 |
| 60km/h以上 | 同位相(最大5度) | アジリティと安定性の両立 |
quattroとの相乗効果
アウディの後輪操舵は、クワトロの性能を最大化するために設計されている。
- コーナリング時:前後トルク配分(40:60) + 後輪操舵 → 最速コーナリング
- 雪道・雨天時:4輪トラクション + 後輪操舵 → グリップ最大化
- Sport Differential(RS):左右トルク配分 + 後輪操舵 → サーキット最速
5. ドイツ御三家 後輪操舵システム徹底比較
| 項目 | BMW Integral Active Steering | メルセデス Rear-Axle Steering | アウディ Dynamic AWS |
|---|---|---|---|
| 最大操舵角 | 3度 | 10度 | 5度 |
| 応答速度 | 0.1秒 | 0.05秒 | 0.08秒 |
| 回転半径短縮 | -1m | -2.1m(Sクラス) | -1.1m |
| 駆動方式連携 | xDrive(4WD) | 4MATIC+(4WD) | quattro(4WD) |
| 設計思想 | FRフィーリング維持 | 快適性最優先 | クワトロとのバランス |
| 得意な使い方 | ワインディング | 都市部+高速 | オールラウンド |
| 採用車種 | 5/7/8シリーズ、X5/X6/X7 | C/E/Sクラス、GLC/GLE、EQS | A8、Q7/Q8、RS6/RS7 |
6. 後輪操舵のメリット・デメリット
メリット
- ①小回り性能向上:大型車でも最小回転半径を大幅に短縮。駐車が楽。
- ②高速安定性向上:レーンチェンジ時の車体の揺れが少ない。横風に強い。
- ③ドライバー負担軽減:ステアリング操作が少なくて済む。長距離運転が楽。
- ④タイヤ摩耗低減:前輪の舵角が減るため、前輪タイヤの摩耗が減る。
- ⑤4WDとの相乗効果:トルク配分と後輪操舵の組み合わせで、究極の走行性能。
デメリット
- ①重量増:後輪操舵機構(約20-40kg)が追加される。
- ②コスト増:システム価格は約30-50万円。
- ③メンテナンス:電動モーター、アクチュエーターの定期点検が必要。
- ④故障リスク:機構が複雑化するため、故障時の修理費が高額。
- ⑤慣れが必要:初めて乗る人は、車の動きに違和感を感じることも。
7. どの後輪操舵システムが優れているのか?
答え:「使い方と好みによる」
BMW Integral Active Steeringが向いている人
- FRフィーリング重視:後輪駆動の感覚を損ないたくない
- ワインディング好き:峠道でのハンドリングを楽しみたい
- 自然なハンドリング重視:機械的な動きを嫌う
- 信頼性重視:シンプルな機構で故障リスクを減らしたい
メルセデス Rear-Axle Steeringが向いている人
- 快適性最優先:「魔法の絨毯」のような乗り心地
- 都市部での使用が多い:狭い道、駐車場での取り回し重視
- 大型車を選ぶ:Sクラス、EQSなどの恩恵が最大
- 高速巡航が多い:レーンチェンジの安定性が最高
アウディ Dynamic All-Wheel Steeringが向いている人
- クワトロ重視:4WDとの相乗効果を最大限に
- オールラウンド性能重視:都市部も高速もバランス良く
- コスパ重視:性能と価格のバランスが良い
- RS/Sモデル志向:サーキットでも使える性能
8. 電動化時代の後輪操舵
EV(電気自動車)の時代、後輪操舵はさらに進化する。
EV専用後輪操舵の可能性
メルセデス EQS:
最大10度の後輪操舵により、ホイールベース3,210mmの巨体が、最小回転半径10.9mを実現。
BMW iX:
Integral Active Steeringに加え、4輪独立モーター制御で、さらなる運動性能向上。
アウディ e-tron GT:
Dynamic All-Wheel Steering + 電動トルクベクタリングで、サーキット走行も可能。
次世代技術:4輪独立操舵
将来的には、4輪すべてが独立して操舵する技術が実用化される可能性がある。
- 横移動(クラブ走行):4輪を同じ方向に向けて、真横に移動
- その場旋回:前後輪を逆方向に向けて、その場で回転
- 対角線走行:斜め方向に進む
すでに、メルセデスのコンセプトカー「Vision AVTR」では、4輪独立操舵が実現されている。
まとめ
- 後輪操舵の目的:小回り性能と高速安定性の両立
- BMW Integral Active Steering:最大3度、FRフィーリング維持
- メルセデス Rear-Axle Steering:最大10度、快適性最優先
- アウディ Dynamic AWS:最大5度、クワトロとのバランス
- 物理学:低速=逆位相でホイールベース短縮、高速=同位相で安定性向上
- 4WD連携:トルク配分 + 後輪操舵で究極の走行性能
- 比較結果:スポーティ=BMW、快適=メルセデス、バランス=アウディ
- 電動化:EVでさらに進化、4輪独立操舵も実現へ
「後輪も曲がる」——これが、現代の高級車の到達点だ。
かつては「夢の技術」だった後輪操舵。しかし今、BMW、メルセデス、アウディは、それぞれの哲学でこの技術を実用化した。
BMWは「FRの気持ちよさ」を守りながら、メルセデスは「最大限の快適性」を追求し、アウディは「クワトロとの融合」を実現した。
もしあなたが次にドイツ車を試乗する機会があれば、駐車場でUターンしてみてほしい。そして、高速道路でレーンチェンジしてみてほしい。
大型車が信じられないほど小回りし、高速域でピタリと安定する感覚——それが、後輪操舵技術の真髄だ。
コメント